Hi there!! I am Shashwat Singh, a third year PhD student at Robotics Institute at Carnegie Mellon University. I am advised by Prof. Zeynep Temel. Previously, I finished my MS in Robotics from University at Buffalo.
My research interests lie in the intersection of robot design and robot learning. I am particularly interested in how we can design robots that can learn from their experiences and adapt to new environments.
In my PhD, I am working on designing robots that can adapt to new environments by changing it's bodily morphology and train them to learn from their experiences. I am also interested in how we can use reinforcement learning techniques to improve the performance of robots.
In my free time, I enjoy working out, cooking, singing and playing guitar.
Recent Work
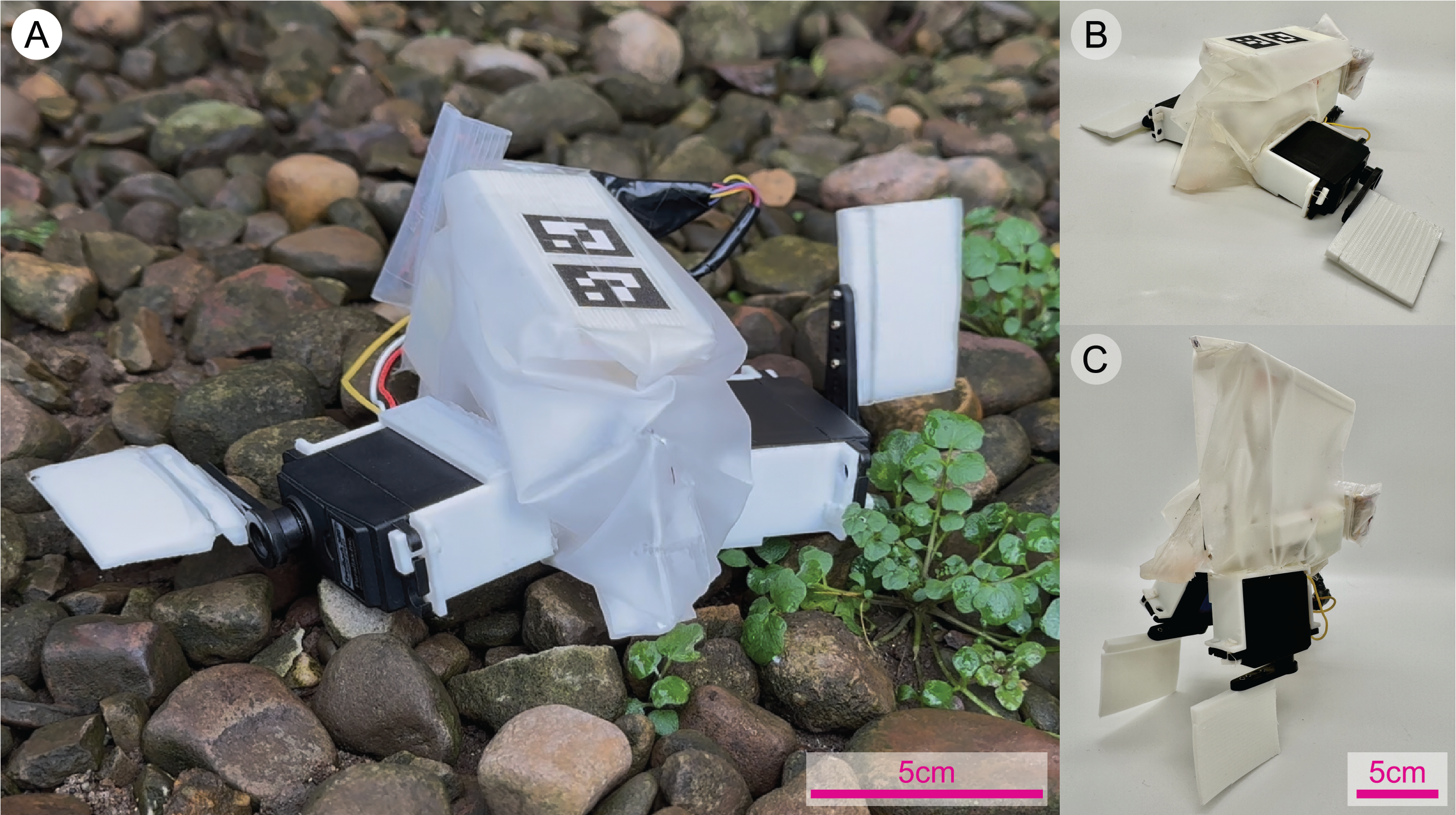
PuffyBot: An Untethered Shape Morphing Robot for Multimodal Locomotion (Under review)
🏆 Best Poster Award - Amphibious Robotics Workshop - ICRA 2025
We present PuffyBot, an untethered shape morphing robot capable of changing its body morphology to navigate multiple environments.
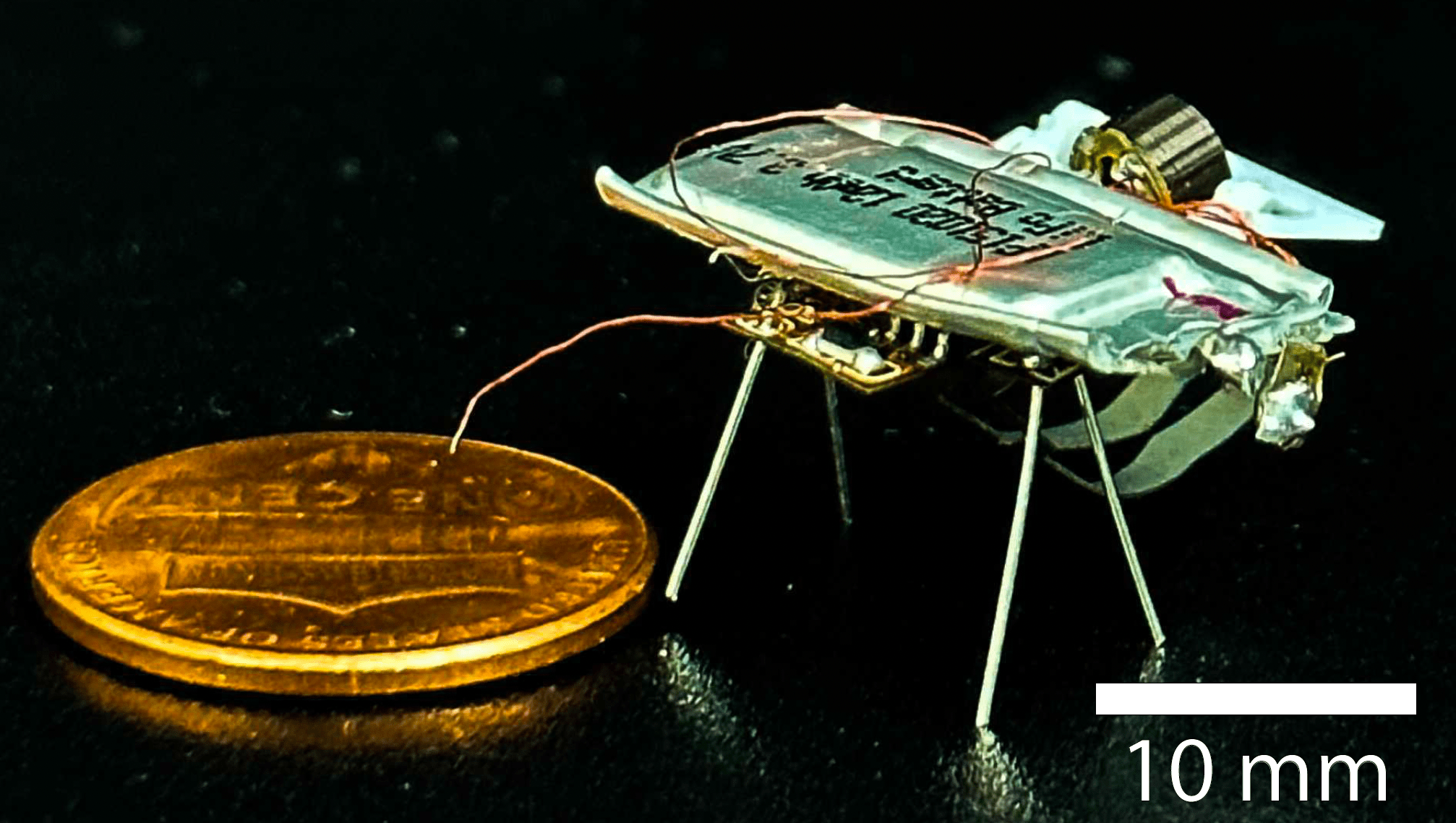
Multi-modal jumping and crawling in an autonomous, springtail-inspired microrobot (ICRA 2024)
🏆 Best Poster Award - Unconventional Robot Workshop - ICRA 2024
This paper presents an autonomous, springtail-inspired microrobot that can crawl and jump. The microrobot has a mass of 980 mg and stands 13 mm tall, and has on-board sensing, computation, and power, enabling autonomy.
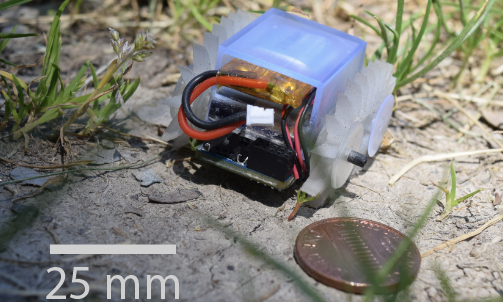
Buffalo Byte: a highly mobile and autonomous millirobot platform (RA-L 2024)
The Buffalo Byte is a small, highly mobile and autonomous millirobot platform that can move on non-smooth, natural terrain. The robot wieghs 11.35 g with an average runtime of 30 minutes with 100mAh battery.